

Introduction
In the world of robotics and simulation, accurately representing real-world objects in virtual environments is crucial. Whether it’s for designing robots, running simulations, or visualizing interactions, choosing the right file format ensures seamless integration between software tools and real-world applications. Various formats have been developed, each catering to specific needs such as physics-based simulations, kinematic modeling, and 3D visualization. This blog explores these file formats, their applications, and how tools like ROS and Isaac Sim can be leveraged for robotics development.
1. Unified Robot Description Format (URDF)
URDF is an XML-based format widely used in the Robot Operating System (ROS) ecosystem. It defines a robot’s physical structure, including links (rigid bodies), joints, sensors, and visual properties. URDF provides a standardized method for modeling robots for simulation and control purposes. Tools such as URDF Viewer can be used to visualize your URDF.
Pros:
- Seamless integration with ROS and Gazebo.
- Standardized structure for robotic kinematics.
Cons:
- Cannot represent closed-loop kinematic chains.
- Limited support for complex geometries and environmental interactions
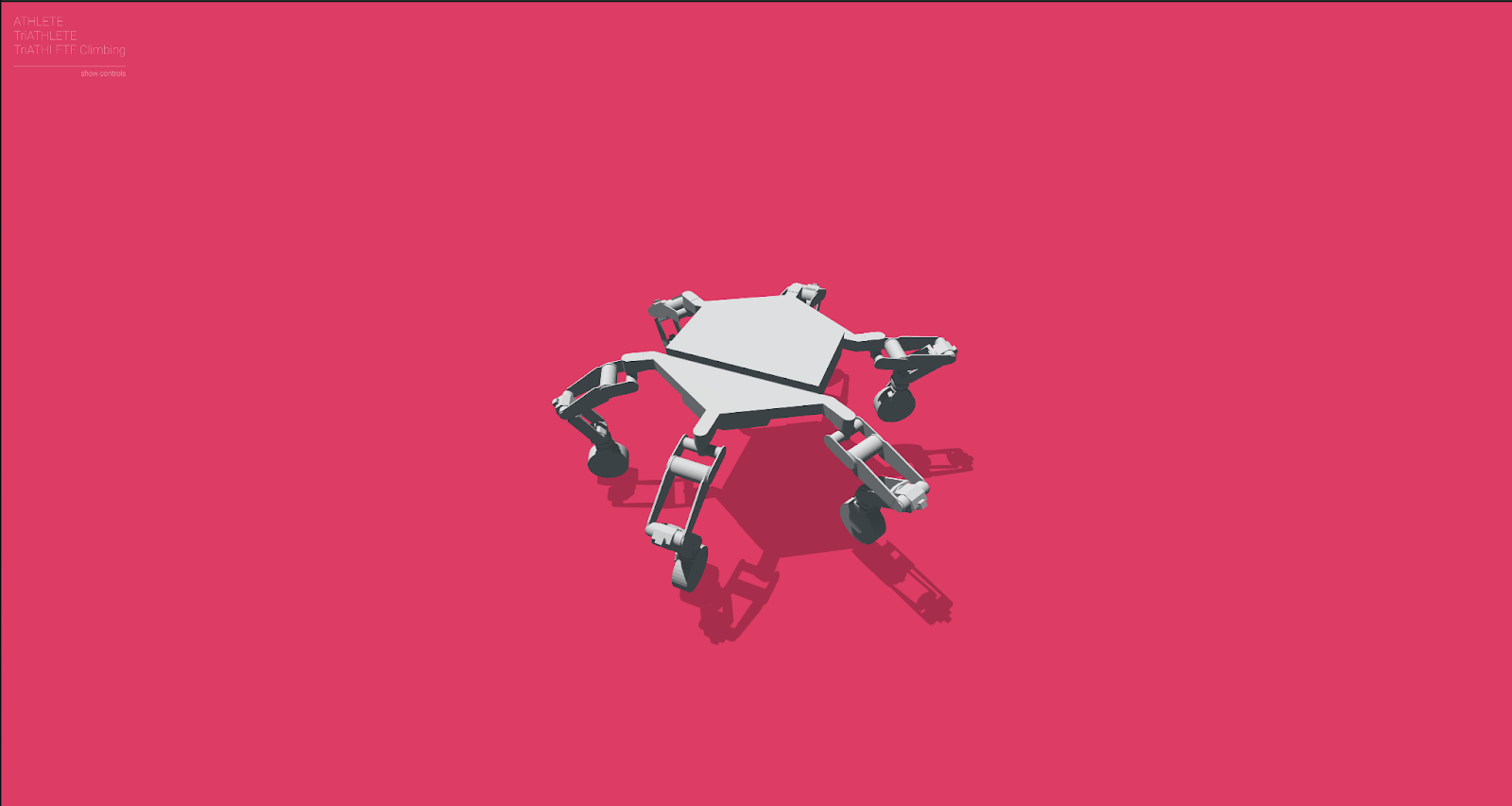
URDF File visualization with URDF Viewer
2. Simulation Description Format (SDFormat)
Originally developed for the Gazebo simulator, SDFormat extends URDF’s capabilities. It supports more advanced features such as closed-loop kinematic chains, sensor modeling, and environment descriptions. SDFormat is XML-based and designed for compatibility with simulation tools.
Pros:
- Advanced simulation capabilities.
- Supports detailed environment and sensor modeling.
Cons:
- Primarily used within Gazebo; requires conversion for other platforms.
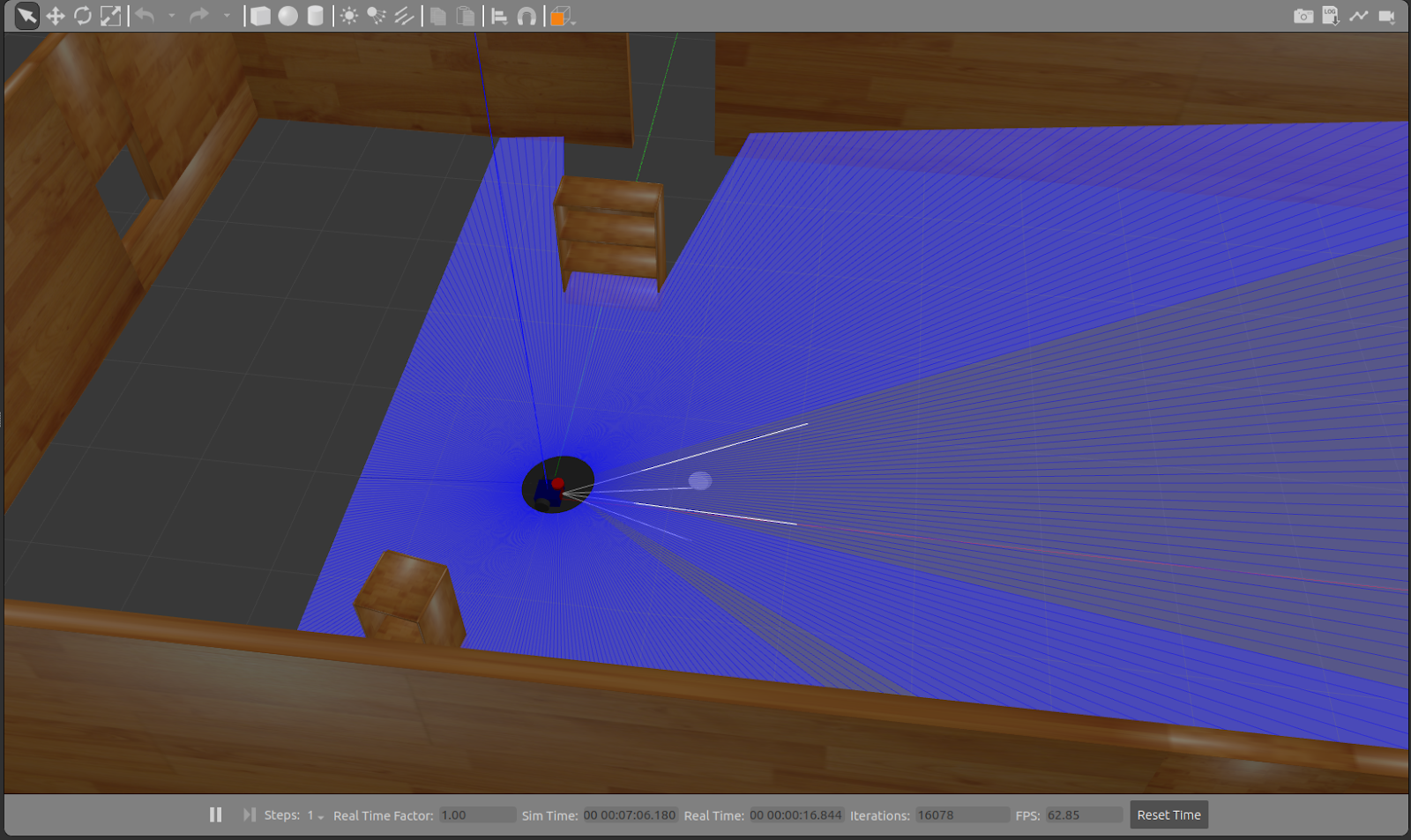
SDF File in Gazebo
3. Universal Scene Description (USD) and OpenUSD
USD, developed by Pixar, is a powerful framework for describing 3D scenes. It allows multiple representations, non-destructive editing, and efficient data handling, making it ideal for large-scale projects. OpenUSD is the open-source implementation, broadening its adoption across industries.
Pros:
- High performance and scalability for complex 3D environments.
- Supports non-destructive edits and layering.
Cons:
- Primarily focused on 3D graphics; may require additional tools for robotics integration.
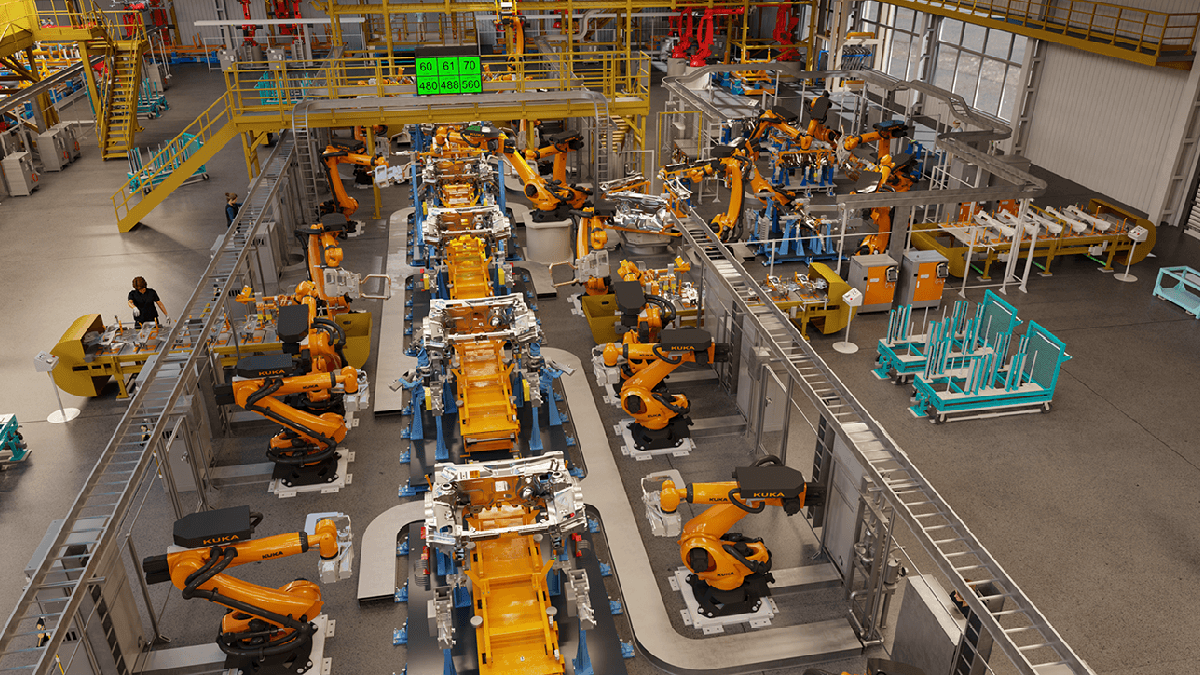
USD FIle with Omniverse Development Kit
4. Collaborative Design Activity (COLLADA)
Managed by the Khronos Group, COLLADA is an open-standard XML-based format used for transferring 3D assets between different applications. It supports geometries, physics, shaders, and animations.
Pros:
- Facilitates interoperability between 3D modeling tools.
- Supports physics simulations and kinematics.
Cons:
- Less commonly used for real-time robotic control.
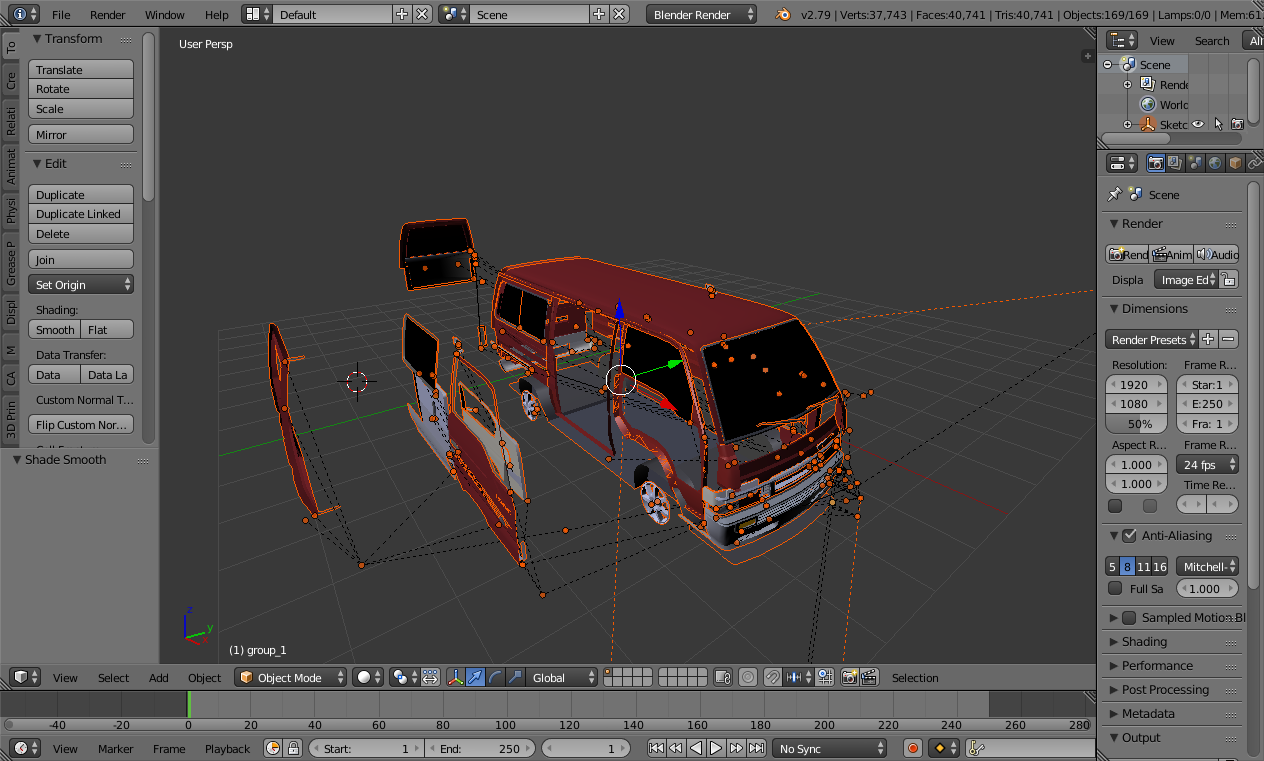
Collada File Example using Blender
5. MuJoCo XML (MJCF)
MuJoCo (Multi-Joint Dynamics with Contact) is a physics engine for robotics and biomechanics. MJCF, its XML-based format, allows detailed modeling of kinematics, dynamics, and control parameters for physics-based simulations.
Pros:
- Highly optimized for physics simulations.
- Allows precise control over dynamic properties.
Cons:
- Limited integration with ROS-based frameworks.
Example of a MJCF File using MuJoCo

How ROS and Isaac Sim Utilize These Formats
ROS Integration:
- ROS primarily relies on URDF and SDFormat to describe robots and environments.
- Tools like MoveIt! use URDF for motion planning and control.
- SDFormat enhances simulation realism within Gazebo.
Isaac Sim:
- NVIDIA Isaac Sim leverages USD as its primary format, enabling high-fidelity simulations and AI-driven training.
- It supports conversions between USD, URDF, MJCF and SDFormat, ensuring compatibility with ROS-based workflows.
- Enables reinforcement learning using Isaaclab and real-time physics-based interactions.
Choosing the Right Format for Your Needs
Selecting the appropriate format depends on your project’s goals:
- For ROS-based Robotics Development: Use URDF or SDFormat.
- For Digital Twin Applications: Use a USD with Omniverse kit developer or Unreal Engine.
- For High-Fidelity Simulations: Use USD with Isaac Sim.
- For Physics-Based Research: Use MJCF with MuJoCo or Use USD with Isaac Sim.
- For 3D Asset Interchange: Use COLLADA for visualization and data sharing.
Interoperability between formats is often required. A robot designed in CAD might be exported to COLLADA for visualization, converted to URDF for ROS-based control, and further adapted for simulation in SDFormat or USD.