
NVIDIA Omniverse is a comprehensive platform that enables developers to create, simulate, and manage 3D applications and virtual environments with unparalleled efficiency and realism. By leveraging Universal Scene Description (USD), NVIDIA’s RTX rendering technology, and a suite of integrated tools, Omniverse facilitates seamless collaboration, real-time simulation, and the integration of generative AI across various industrial applications.
Key Components of NVIDIA Omniverse
Omniverse Nucleus
Omniverse Nucleus serves as the collaboration and database engine, allowing multiple users and applications to connect and collaborate in real-time. It provides fundamental services for sharing and modifying virtual world representations, fostering a cohesive development environment.
Omniverse Connect
This framework offers a suite of tools and plugins for seamless data integration and synchronization across various design, engineering, and rendering applications. Connectors are available for Autodesk Maya, Blender, and Adobe Photoshop, enabling users to incorporate their preferred software into the Omniverse ecosystem effortlessly.
Omniverse Kit
A powerful software development kit (SDK), Omniverse Kit enables developers to build custom applications, extensions, and microservices. Its modular and extensible architecture allows developers to tailor solutions for specific project requirements, enhancing productivity and innovation.
RTX Renderer
At the core of Omniverse’s visualization capabilities is the RTX Renderer, which provides real-time ray tracing and path tracing functionalities. This ensures that simulations and visualizations are not only accurate but also photorealistic, improving the fidelity of digital twins and 3D applications.
Why NVIDIA Omniverse Matters
Real-Time Collaboration
Omniverse allows multiple users to work simultaneously on the same project, with changes reflected in real-time. This reduces development cycles, minimizes errors, and enhances team productivity.
Interoperability
By supporting USD and providing connectors for industry-standard applications, Omniverse ensures that assets and scenes can be shared and edited across different tools without fidelity loss. This streamlines the development process and fosters innovation.
Scalability
Omniverse’s cloud capabilities enable applications to be deployed at scale, making it suitable for large enterprises and complex projects. Whether on local workstations or cloud-based platforms, Omniverse provides the flexibility to meet diverse computational needs.
Use Cases of NVIDIA Omniverse
Synthetic Data Generation
Omniverse is widely used for generating synthetic data for AI model training. High-fidelity simulations allow developers to create large, diverse datasets for autonomous driving, robotics, and industrial automation. The photo-realistic rendering and physics-based interactions provide accurate training environments, reducing reliance on expensive real-world data collection.
Digital Twins
Omniverse enables the creation of digital twins—virtual replicas of real-world environments. Industries like manufacturing, smart cities, and logistics use digital twins to optimize operations, predict maintenance needs, and enhance decision-making through real-time simulation.
Autonomous Vehicles and Robotics
Companies like Uber use Omniverse to simulate diverse driving scenarios for autonomous vehicle development. The platform’s advanced physics engine and generative AI models create realistic road conditions, traffic patterns, and environmental variations.
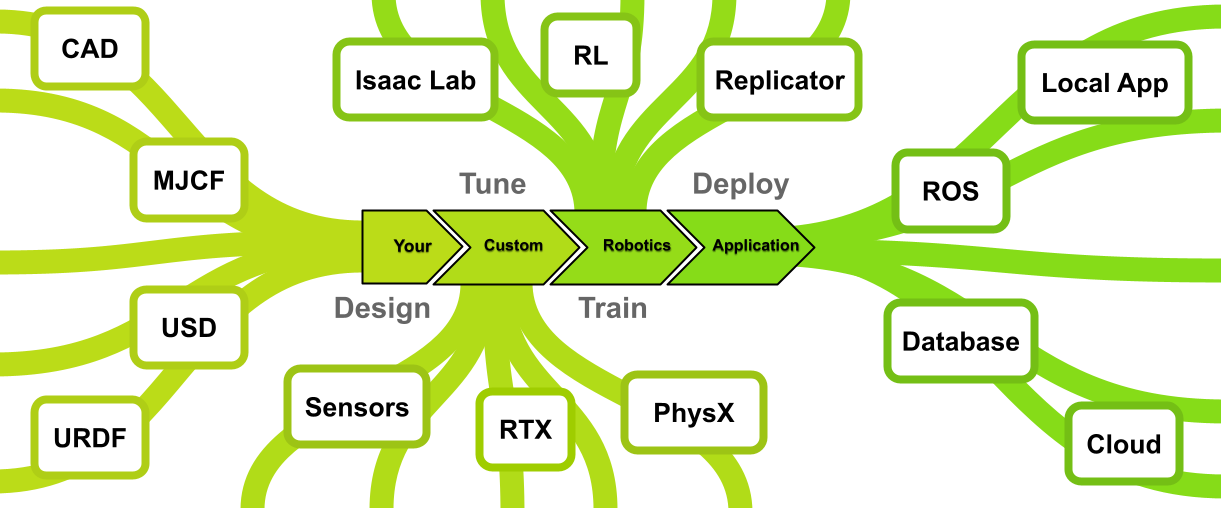
NVIDIA Isaac Sim: A Powerful Robotics Simulation Platform
Isaac Sim is a high-fidelity robotics simulation tool built on NVIDIA Omniverse. It provides photo-realistic, physics-accurate environments where developers can design, test, and validate robots before deploying them in the real world.
Key Features of Isaac Sim
- Realistic Physics Simulation
- Uses NVIDIA PhysX 5 for accurate rigid-body and soft-body dynamics.
- Supports articulated robots, force-torque sensing, collision detection, and contact modeling.
- GPU-Accelerated Simulation
- Ray tracing and path tracing with NVIDIA RTX for realistic lighting, shadows, and reflections.
- Parallel simulation for running multiple robots simultaneously.
- Interoperability with ROS & ROS 2
- Full support for ROS and ROS 2, allowing seamless integration with robotic frameworks.
- ROS-based navigation, perception, and control can be tested in simulated environments.
- Synthetic Data Generation
- Generates labeled training data for AI models, using domain randomization and sensor simulation.
- Supports LiDAR, RGB cameras, depth sensors, and segmentation masks.
- Digital Twins for Robotics
- Enables the creation of real-world replicas of robots and environments.
- Helps fine-tune control policies before real-world deployment.
- Multi-Robot Simulation
- Simulates fleets of autonomous mobile robots (AMRs), drones, humanoids, and industrial manipulators.
- Supports multiple physics engines, including PhysX, MuJoCo, and Bullet.
Use Cases of Isaac Sim
Robot Design & Testing
- Test robot models before manufacturing, reducing development time and costs.
- Validate kinematics, dynamics, and control algorithms.
Synthetic Data for AI Training
- Train perception models using high-fidelity synthetic data.
- Generate diverse training scenarios for robot vision and autonomous navigation.
Reinforcement Learning (RL) & AI Training
- Train deep reinforcement learning (RL) policies for robot control.
- Simulate thousands of episodes in parallel, reducing training time.
Digital Twins for Industry 4.0
- Develop smart factories and warehouses using Omniverse-based digital twins.
- Optimize robotic automation and predict failures before they happen.
Autonomous Vehicle Simulation
- Test and validate self-driving vehicle algorithms in photorealistic environments.
- Simulate traffic, pedestrians, and environmental conditions for AV development.
NVIDIA Isaac Lab: Robotics Reinforcement Learning Framework
Isaac Lab is an RL research framework built on Isaac Sim, designed to train robots in simulation using deep reinforcement learning (RL). It is based on Omniverse, Isaac Gym, and skrl, and enables training of robotic control policies at scale.

Key Features of Isaac Lab
- Massively Parallel RL Training
- Uses GPU acceleration to run thousands of robot simulations simultaneously.
- Achieves 100x faster training compared to CPU-based simulations.
- Pre-Built Environments & Benchmarks
- Includes standard RL environments like cart-pole, humanoid locomotion, quadrupeds, manipulators, and mobile robots.
- Compatible with Isaac Gym environments for easy integration.
- Multi-Agent RL (MARL) Support
- Allows training of teams of robots, such as fleets of AMRs or swarms of drones.
- Supports collaborative and competitive multi-agent RL training.
- Integration with skrl & RL Libraries
- Supports popular RL frameworks, including:
- SKRL (NVIDIA’s RL library)
- Stable-Baselines3 (SB3)
- RLlib (Ray-based RL framework)
- Enables training using PPO, SAC, TD3, and other RL algorithms.
- Supports popular RL frameworks, including:
- Domain Randomization & Sim-to-Real Transfer
- Varies lighting, textures, physics properties to generalize RL models.
- Prepares policies for real-world deployment without overfitting to simulation.
- Advanced GPU-Based Physics
- Supports soft-body physics, contact-rich interactions, and high-speed robotic manipulation.
- Useful for training robot hands for dexterous grasping.
Use Cases of Isaac Lab
Robot Locomotion
- Train humanoids, quadrupeds, and bipedal robots for dynamic walking.
- Simulate rough terrains, stair climbing, and obstacle avoidance.
Robotic Manipulation
- Train robot arms, dexterous hands, and grippers for precise control.
- Simulate grasping, pushing, and object manipulation tasks.
Autonomous Navigation
- Reinforce path planning for AMRs, warehouse robots, and drones.
- Simulate multi-agent environments for swarm robotics.
Sim-to-Real Transfer
- Train models in Isaac Lab and deploy them on real robots without retraining.
- Domain randomization ensures policies generalize well in real-world conditions.
Multi-Agent RL (MARL)
- Train multiple robots collaboratively or competitively.
- Used in robot soccer, warehouse coordination, and swarm robotics.
Comparison between Isaacsim and Isaaclab
| Feature | Isaac Sim | Isaac Lab |
| Primary Use | Robot simulation & synthetic data generation | Reinforcement learning & AI training |
| Physics Engine | PhysX 5, MuJoCo, Bullet | PhysX 5 (GPU-accelerated) |
| ROS & ROS 2 Support | Yes | No |
| Synthetic Data Generation | Yes | No |
| Multi-Agent RL | No | Yes |
| GPU-Accelerated RL | No | Yes (1000s of robots in parallel) |
| Interoperability with Omniverse | Yes | Yes |